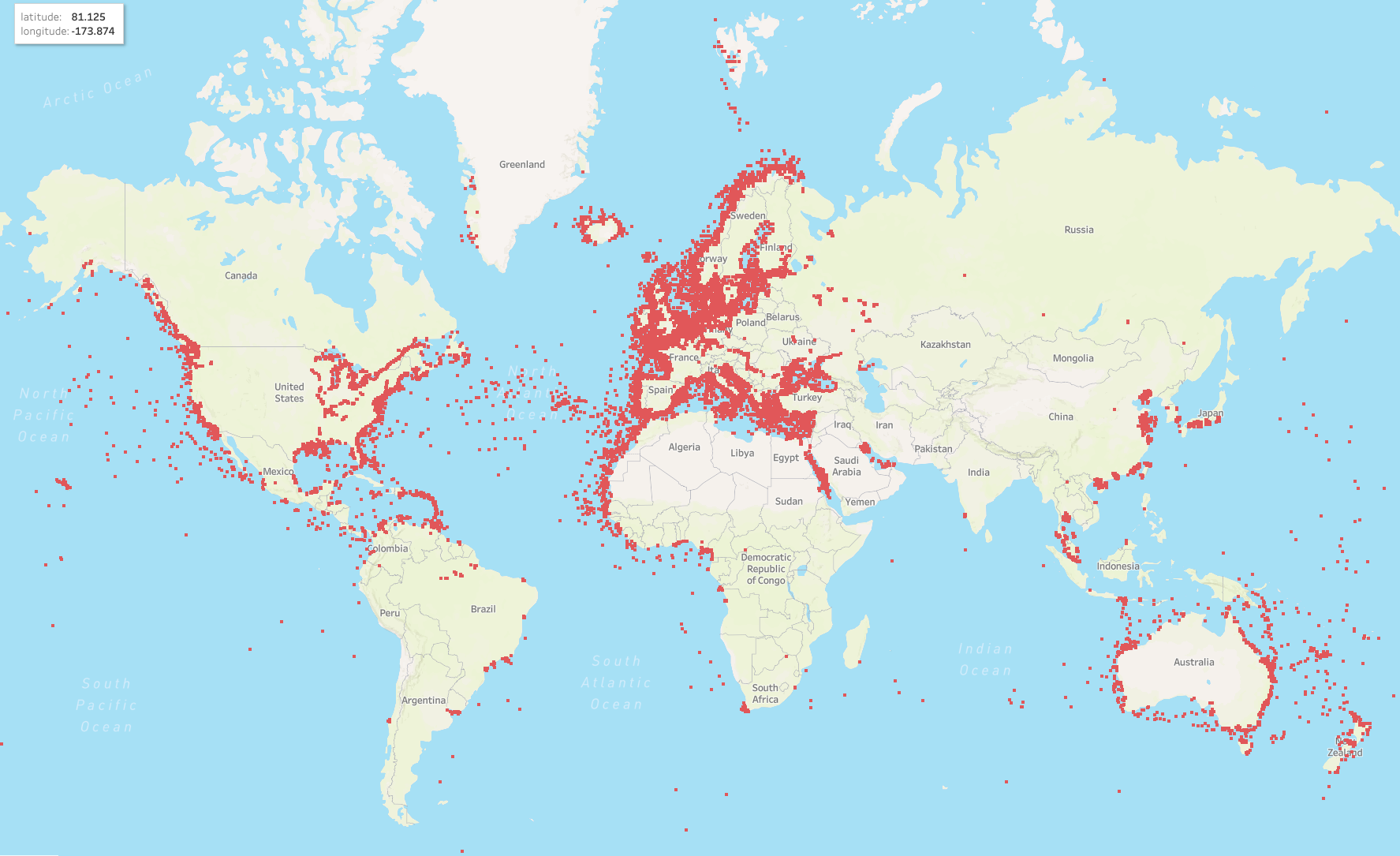
Boat Beacon can now share its real time AIS feed from our global AIS aerial network via NMEA with other apps on the same device or on the same Wifi Network. Boat Beacon acts as a “Virtual AIS Receiver” with over the horizon coverage and is the first and currently only app out there that offers this.
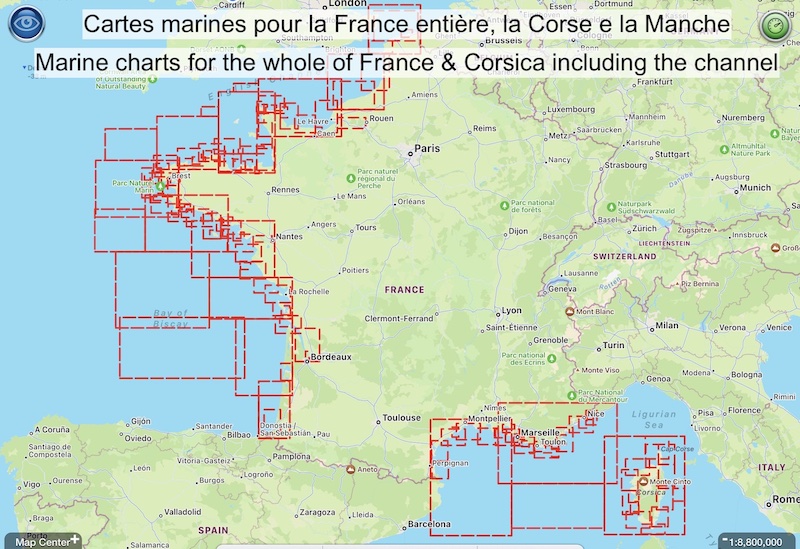
Boat Beacon’s global realtime AIS coverage.
We hope this will prove popular with folks who already have other Marine Navigation apps/charts like Navionics, iNavX, Aqua Map and OpenCPN etc. which support an external NMEA AIS feed but don’t have their own Internet based AIS network or feed available.
Navionics have worked closely with us on this with their Boating app AIS feature and recommend Boat Beacon in its own category in their Boating app – AIS Devices Compatibility Guide.
The new Boat Beacon AIS Share feature is free to trial. If you find it useful you can use it any time when you are out boating for a small monthly or annual subscription via IAP.
You can get the latest version of Boat Beacon from the Apple App Store here and Google PlayStore here.
By the way, our own top selling marine charts navigation app SeaNav already has AIS built in as standard and if you haven’t tried SeaNav why don’t you give it a spin for free first, you can download it from here now https://apps.apple.com/app/seanav/id857841271 .
Here are some screenshots from Navionics, iNavX and OpenCPN using it.
Navionics connected to Boat Beacon on 127.0.0.1 TCP port 5353
On iOS
On Android
iNavX on same device ( using TCP 127.0.0.1 port 5353 )
Share Boat Beacon’s real time internet AIS feed via NMEA with other apps on your device and on the same Wifi network, like Navionics, OpenCPN on your Mac, iNavX , AquaMap etc. so you can see live ship positions around you on their charts as well. Pocket Mariner’s AIS service is fed by one of the largest network of AIS shore receivers world-wide covering most major ports, harbours and popular coastal areas with over 60,000 live ship positions at any time. Boat Beacon acts like a virtual AIS receiver and can also share your live position via Internet AIS with other users and internet based AIS services like MarineTraffic. After purchasing the Boat Beacon AIS Sharing IAP (monthly or yearly subscriptions available) just set your other apps NMEA TCP settings to connect to the IP address and TCP port (default is 5353) shown in Boat Beacon’s AIS Share setting. If you are sharing with an app on the same device you should use 127.0.0.1 as the IP address to connect to instead of the actual device IP address so you never have to change the setting when you are on a different network. Boat Beacon must be in sailing mode when sharing with other apps on the same device so it can track your position and continually update the live AIS data around you in the background. Tap the SailBoat icon bottom left to enable Sailing mode.In the unlikely event that you need to change the TCP port number in Boat Beacon to another number, tap on the AIS Share setting row and enter it.
On iOS you can try it out at home when there are no boats around your location by putting Boat Beacon into Demo mode ( Settings/Demo mode) first and then set sailing mode. Make sure the other app is showing the same map location as the demo mode is. Make sure to turn sailing and demo mode off when you are done. If Boat Beacon is not displaying any ships around your location then no ships will appear in the other apps either.
On Android get a 3 day free trial to try it out when you sign up for one of the subscription options. You can cancel the subscription at any time and will not be charged anything if you cancel before the end of free trial period.
Get the latest version of Boat Beacon from the App Store from here now and Google PlayStore here.
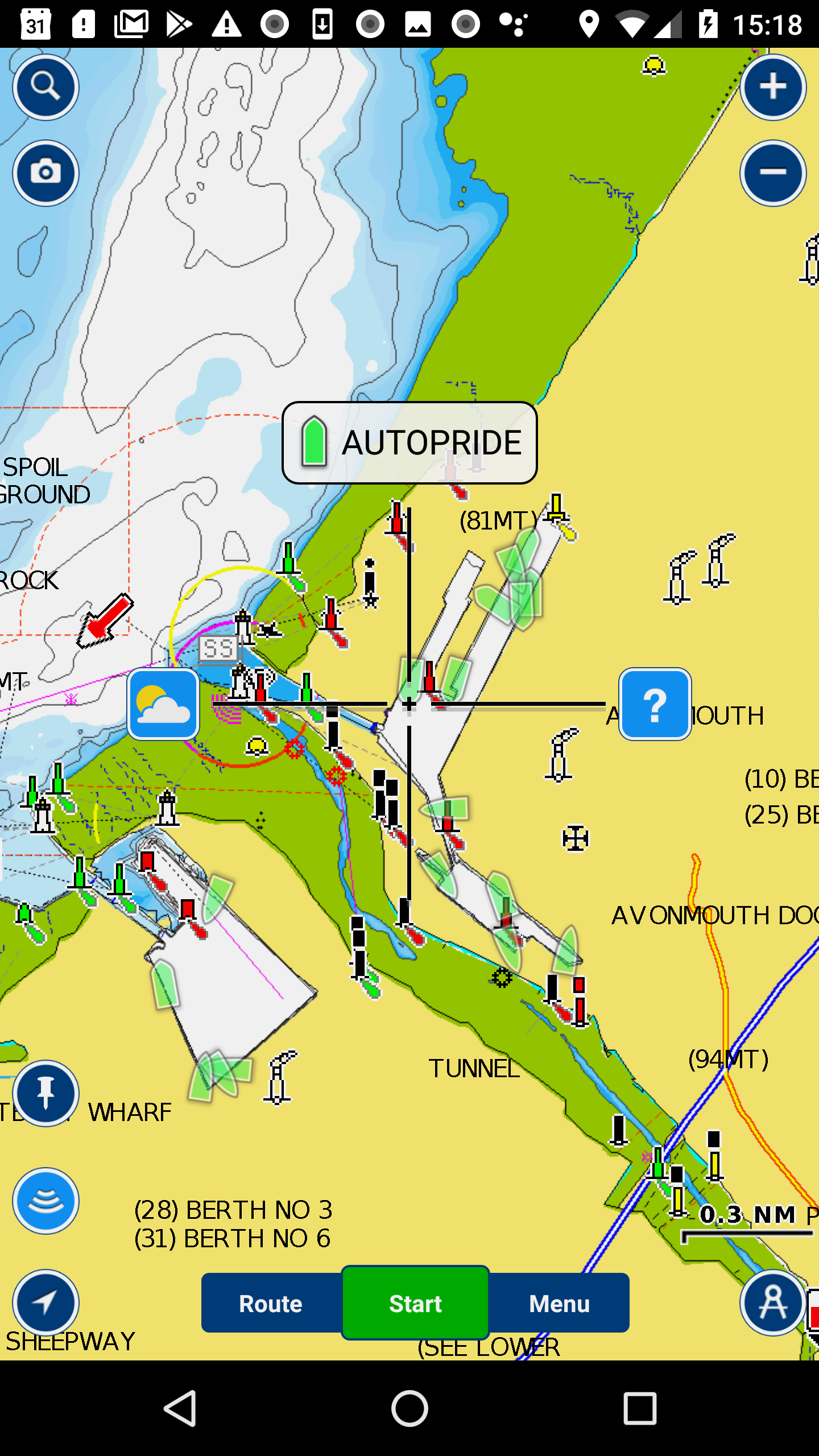
Automatically follow your route with SeaNav’s autopilot mode. SeaNav can control Raymarine and Navico/B&G/Simrad/Lowrance auto tillers and helms to sail a SeaNav route. You can also use SeaNav on your iPhone or Apple Watch as a remote control for your Raymarine Tiller and Wheel Pilot
Here is a demonstration sailing a SeaNav demo route in the Pocket Mariner’s shore based lab with a Raymarine ST1000+ Tiller pilot.
SeaNav running on an iPhone is connected to the Tiller pilot via SEATALK over Wifi using the OnWatch Wifi adapter. The current boat’s heading is 110° and we are in Auto mode on the Tiller pilot maintaining that heading.
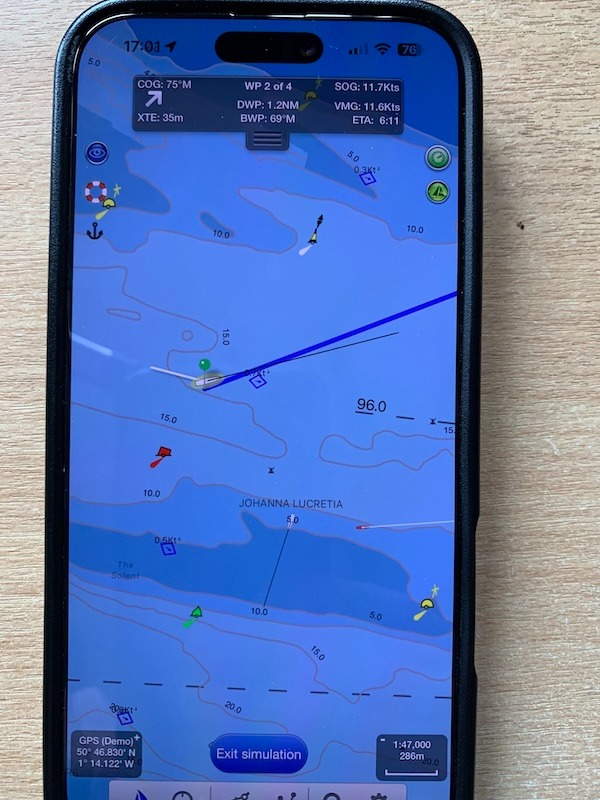
We start sailing the route in SeaNav by tapping the sailboat icon bottom left, note the BWP (Bearing to the first Waypoint is) at the top centre of the screen is 113°.
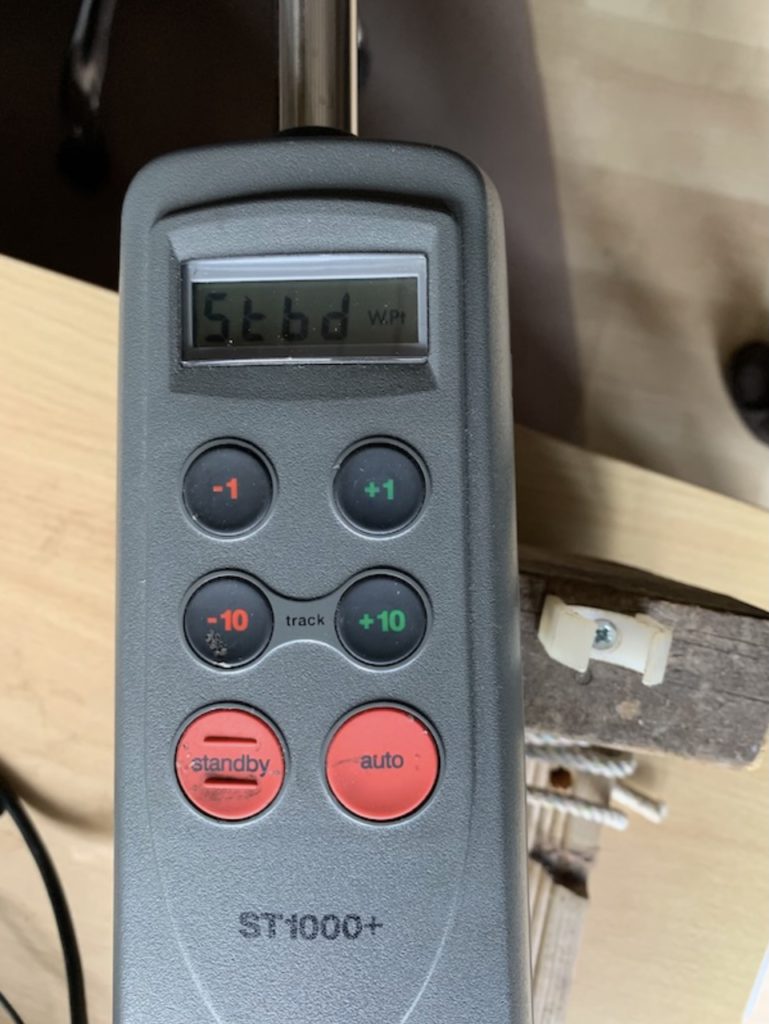
SeaNav tells the autopilot the course to steer to the first Waypoint from our current position. As the BWP is 113° and the boat is currently sailing 110° the tiller pilot tells us it needs to change course (it beeps) and shows us which way it is going to turn; to Starboard on a new course heading of 113°.
Press -10 and +10 together on the Tiller (Track) to accept the new course. The tiller pilot stops beeping and shows us the distance to the 1st Waypoint is now 0.1nm using the information from SeaNav.
We reach the 1st waypoint and SeaNav tells the tiller pilot we need to change course again to Waypoint 2. The tiller pilot sounds the Waypoint changed alert and shows us the new course , the direction it is going to turn (to port). Pressing Track again (-10 and +10 pressed at the same time) accepts the course change.
The tiller pilot stops beeping and changes our boat’s heading ( simulated by rotating the tiller pilot on the desktop) until we are lined up with 71° (note the t in front of the course showing it is in tracking mode). The tiller display then continually cycles through the new course information showing us the course, off track error and distance to the second waypoint (DWP) 1.2nm updated by SeaNav as we sail towards waypoint 2.
and here we are heading for Waypoint 2 in SeaNav. There is an optional advanced mode where SeaNav will automatically tell the Tiller to accept the new course without the need to Press the Track mode on the tiller – see below.
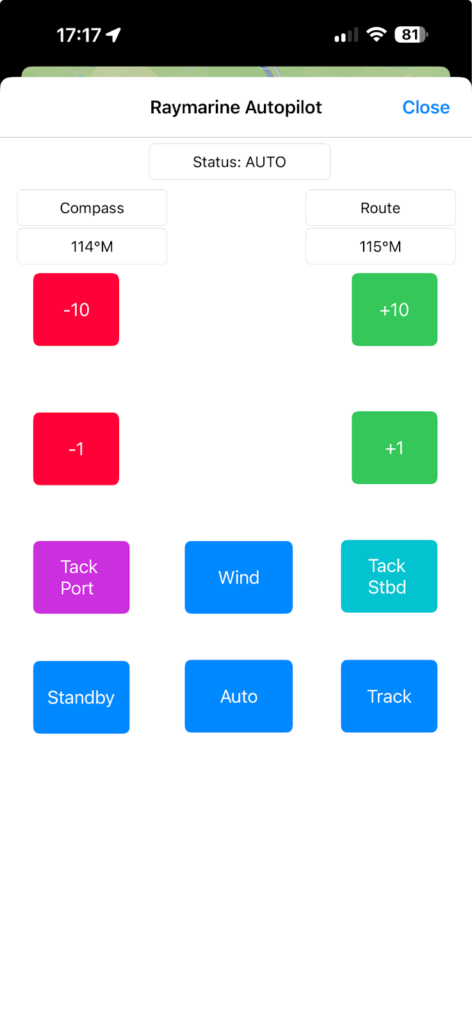
SeaNav can remotely control the Auto tiller buttons and view its status (tap the autohelm button towards the top right of the screen in SeaNav to show the remote control buttons and Autopilot status) :-
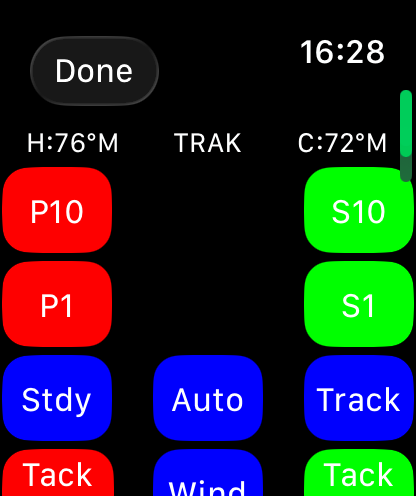
The SeaNav Apple Watch can also control the Raymarine AutoPilot. Tap the autopilot symbol (blue bottom centre) on the Waypoint watchface to view the AutoPilot status and controls:-
Setting up SeaNav to use a Raymarine AutoPilot with the OnWatch Wifi adapter.
Hardware setup
Raymarine ST1000+ and 2000+
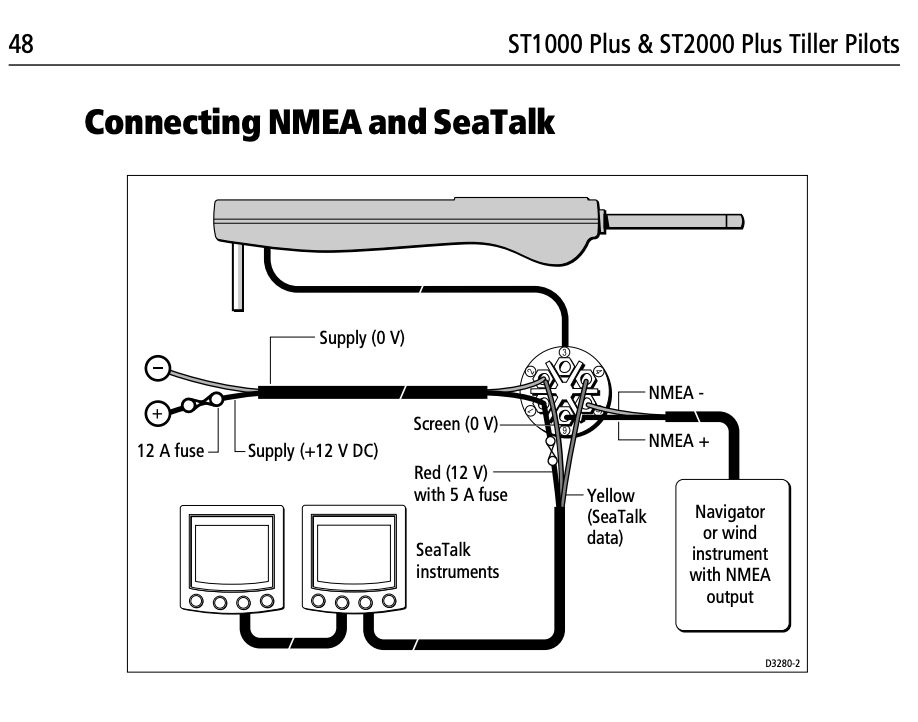
Only 3 wires need to be connected, Yellow SeaTalk, 12V brown (+ve) and blue (-ve).
The Raymarine ST1000+/20000+ Tiller pilot has 5 wires in its connecting cable – brown, blue, yellow, green and white.
Connect the yellow SeaTalk wire/terminal(4) from the Raymarine Autohelm/tiller to the Data terminal (far left) on the OnWatch device.
Connect 12V and GND on the OnWatch to the 12V brown (+ve) and blue (-ve) auto tiller power leads or boat supply (pin 1 +and 2 -).
Raymarine ST4000+
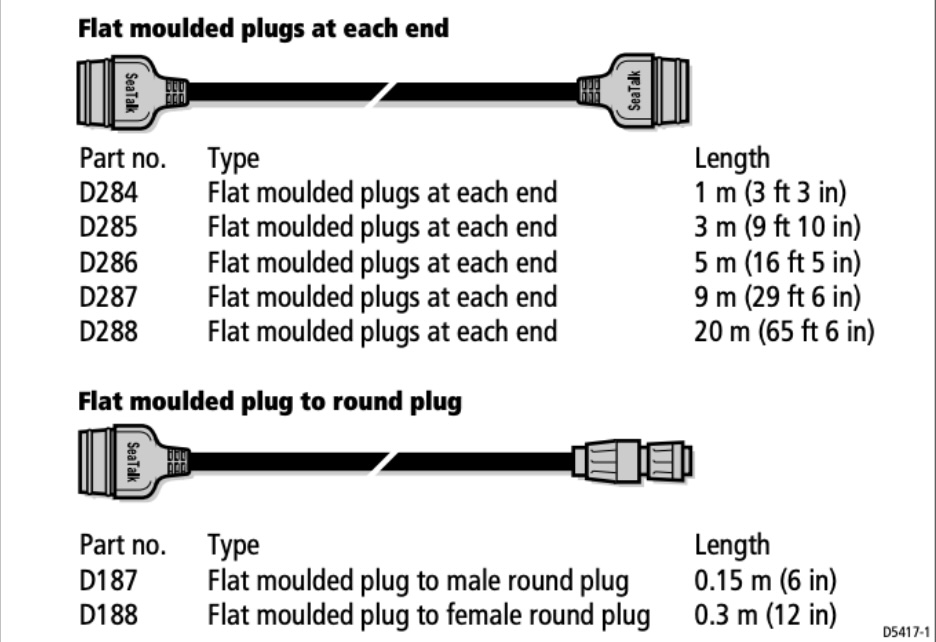
Connect the OnWatch Adapter to 12V and the SeaTalk bus using a SeaTalk cable from the control unit rear as above. The correct part number for the cable with a connector one end and bare wires the other is D229 (also Rul-4001-136-A). You can use a SeaTalk cable and cut a connector off one end. The SeaTalk cable data wire is yellow, the + and – 12V wires are usually red (+ve) and black (-ve/gnd).
iPhone and SeaNav configuration
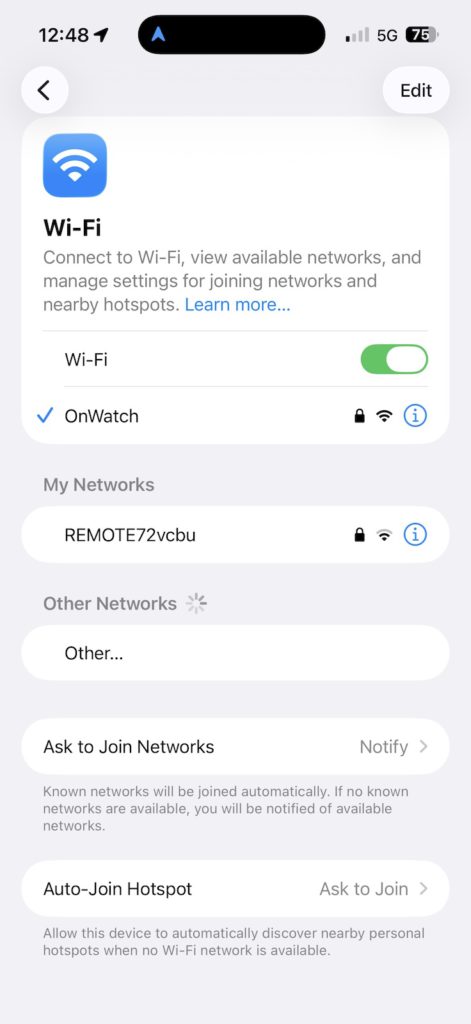
Set the iPhone to use the OnWatch wifi network and connect to it. (default password 12345678)
Now configure SeaNav to talk and listen to the AutoPilot. Go to Settings/AIS, GPS & NMEA Link .
Screenshot
Configure it to use TCP to IP address 192.168.8.1 , port 2001 . Set the AutoPilot switch on. If the hardware is all connected up you can tap Start and should see live data from the AutoPilot. Blue for received messages and green for sent.
Back on the SeaNav chart view the Autopilot symbol top right should now be green and if you tap it you can see the Raymarine Autopilot status and remote controls.
You are now ready to sail a SeaNav route automatically. Make sure the Autopilot/tiller is in Auto mode and then just start sailing a route or to a point by tapping the Sailboat icon. Press Track mode on the Autopilot/tiller to start following the SeaNav route. The SeaNav autopilot should now be blue.
If you want to disconnect SeaNav from the Autopilot tiller/helm tap the Standby button on the autopilot. Re-connect to the SeaNav route by tapping the Auto button. To completely disconnect, turn off the Autopilot switch in SeaNav Settings/AIS, GPS & NMEA Link or stop the link.
AutoTrack
You can set SeaNav to automatically tell the Autopilot/tiller to accept new Waypoints. In Settings/AIS, GPS & NMEA Link tap the AP NMEA Messages button below the Autopilot switch. Then switch AutoTrack on. Now every time a waypoint is reached SeaNav will auto-confirm the waypoint change and you do not need to acknowledge it by pressing the Track buttons on the Auto tiller/pilot. Please use with care as unattended course changes could be un-safe.
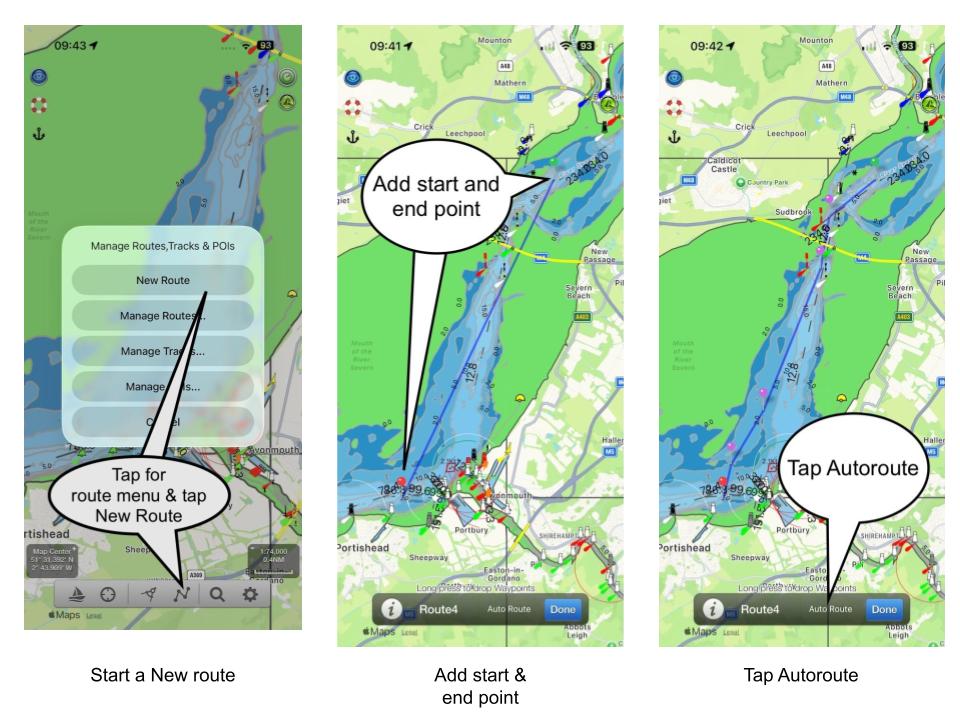
SeaNav “Autoroute” lets you quickly generate a route between end points based on depths and obstacles. Just set the start and end points and tap “autoroute”.
Most times these will match what an experienced navigator would manually place. Always check the suggested route for safety before following it. Autoroute is a planning tool and not a replacement for human judgement.
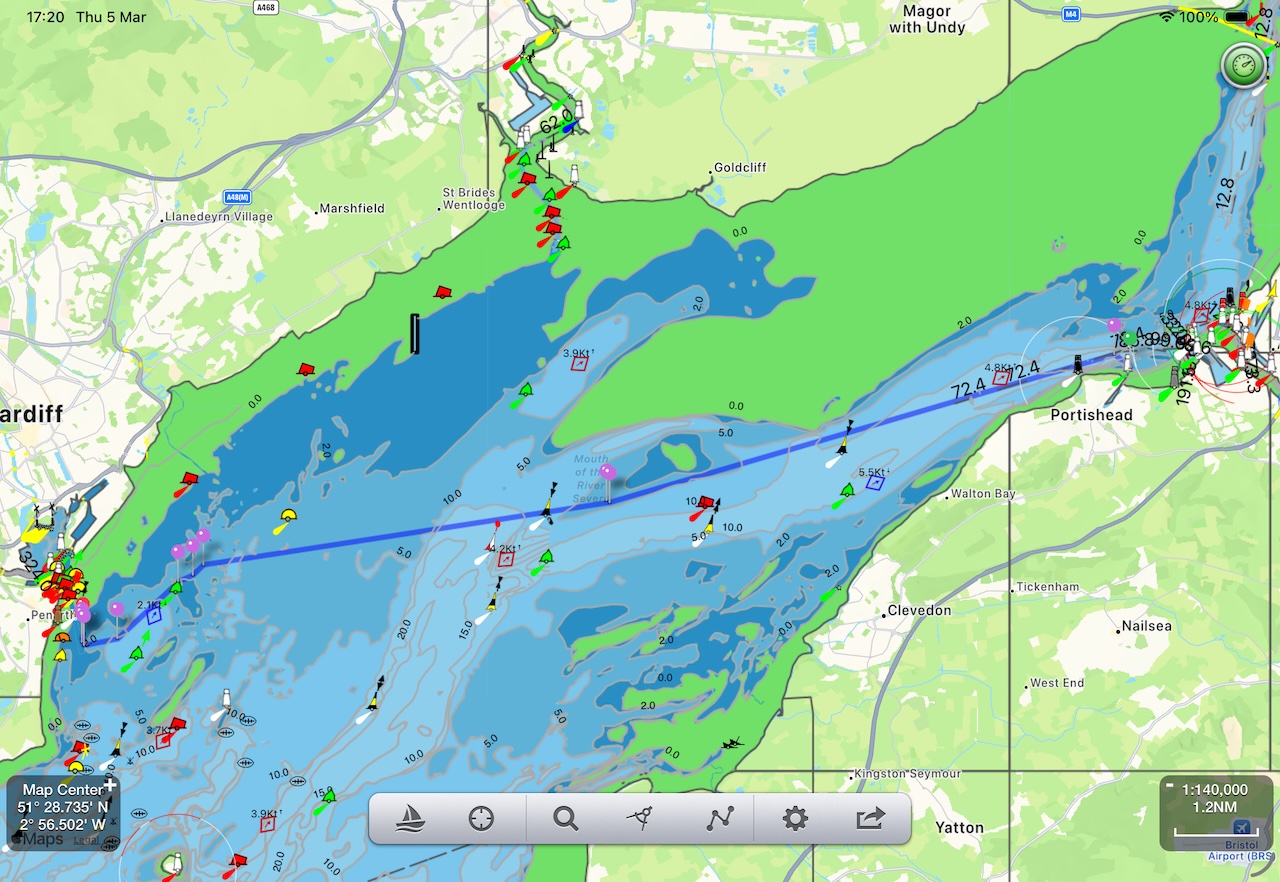
You can drag and drop waypoints to customise the generated route. You can always tap autoroute again to have another go. Here is one we made earlier for a route from Portishead to Cardiff in the Bristol Channel. Spot on.
Sometimes autoroute can fail to find a route due to shallow depths, obstacles, narrow passages or even make a crazy route. Humans are still better than machines – thankfully. Moving the endpoints into deeper water, breaking the route down into shorter sections or moving the end points nearer together and re-tapping autoroute can solve this in most cases. If you are near the ICW on the East coast of the US, Autoroute will offer to use that.
Bridge narrows, lock entrances, and very tight tidal gates are places where chart data precision and autoroute resolution can conflict. The right approach is to place a manual waypoint at the exact gate/gap. autoroute then handles each open-water segment on either side.
Autoroute will ask for any missing charts for a route if you haven’t already downloaded them. This is a great way of making sure you have all the charts you need for offline use for a passage.
Please note:
SeaNav autoroute is designed for open water routes and the Intracoastal Waterway (ICW) in the US. For the ICW we use Bobs423 ICW Tracks & Routes to help inform the routes. autoroute will not handle very narrow channels like canals & inland waterways.
Routes can be shared and exchanged as GPX files for use with other Chart Plotters and by other SeaNav users.
The SeaNav autoroute is based on the lowest astronomical tide. It does not take tides or tidal streams into account. Similarly SeaNav Autoroute does not look at weather or wind.
As always, the captain takes full and sole responsibility for his vessel in using routes from SeaNav. Tides, weather, pilot guides and notes to navigation should be consulted.
Here is a step by step guide to creating a route including the ICW on the East coast of the US. Tap the route button at the bottom of the screen and select “New route”. You can also long press anywhere on the screen and tap “Start new route from here”. We are starting in open water but our destination is inland on the ICW.
Long Press on the chart to add the Start and end points for your route
Next tap “Auto Route”
In this case Autoroute cannot find an open sea route but it spots there is an ICW one so it offers the ICW tracks. Tap “Get Tracks for the ICW”. If you have previously done this, SeaNav Autoroute will automatically find the track for you without you having to go and get them again.
You will be taken to the SeaNav Bobs Tracks page. Scroll down to the link for the track for this section of the ICW. SeaNav will have automatically selected the correct track file for this route. If not you can browse the list of tracks via the link to Bobs Tracks download page.
The track will download and a Downloaded prompt will show at the bottom of the page. Tap Save and Save to files and then tap Open In
You will be shown a list of Apps to open the file with. SeaNav should be in the icon list – if not scroll to the right and select SeaNav after tapping More…Tap SeaNav
SeaNav will re-open and offer how to use the Bob’s track. Tap “Import as Track” (this is essential – you do not want a route created directly from the Bob’s track as this would have far too many waypoints).
The track will show on the map as a thin white dashed line – it will be the whole track from Norfolk to Southport. Next tap “Auto Route” again and SeaNav will use the track to guide the route.
Now you have a route
You can give the Route a name (type over Route2) if you want to now or edit it later via Manage Routes. Tap Done and you can now use the route. Tap the Sailboat icon bottom left to start sailing it.
You can hide the white track by tapping the Routes menu, Selecting Manage Tracks and turning off the Norfolk to Southport track. When you start sailing the route the SeaNav HUD will give you the distances and a continuous update ETA to your next waypoint and to the end of the route based on your current speed. You can also check the total length of the route via Manage routes.
Automatically follow your route with SeaNav’s autopilot mode. SeaNav can control Raymarine and Navico/B&G/Simrad/Lowrance auto tillers and helms to sail a SeaNav route. You can also use SeaNav on your iPhone or Apple Watch as a remote control for your Raymarine Tiller and Wheel Pilot
Please note the SeaNav autopilot feature is currently in Beta and requires an NMEA to WIFI adapter like this NMEA3WIFI gateway . Drop us an email to help@pocketmariner.com if you would like to take part in the Beta program.
Here is a demonstration sailing a SeaNav demo route in the Pocket Mariner’s shore based lab with a Raymarine ST1000+ Tiller pilot.
SeaNav (v5.5 build 8 or later) running on an iPhone is connected to the Tiller pilot via SEATALK over Wifi using an NMEA3WIFI gateway. The current boat’s heading is 110° and we are in Auto mode on the Tiller pilot maintaining that heading.
We start sailing the route in SeaNav by tapping the sailboat icon bottom left, note the BWP (Bearing to the first Waypoint is) at the top centre of the screen is 113°.
SeaNav tells the autopilot the course to steer to the first Waypoint from our current position. As the BWP is 113° and the boat is currently sailing 110° the tiller pilot tells us it needs to change course (it beeps) and shows us which way it is going to turn; to Starboard on a new course heading of 113°.
and automatically turns the boat to head in that direction. The tiller pilot shows us the distance to the 1st Waypoint is now 0.1nm using the information from SeaNav.
We reach the 1st waypoint and SeaNav tells the tiller pilot we need to change course again to Waypoint 2. The tiller pilot sounds the Waypoint changed alert and shows us the new course , the direction it is going to turn (to port) and turns to it.
The tiller pilot changes our boat’s heading ( simulated by rotating the tiller pilot on the desktop) until we are lined up with 71° (note the t in front of the course showing it is in tracking mode). The tiller display then continually cycles through the new course information showing us the course, off track error and distance to the second waypoint (DWP) 1.2nm updated by SeaNav as we sail towards waypoint 2.
and here we are heading for Waypoint 2 in SeaNav.
SeaNav can also remotely control the Auto tiller buttons and view its status (tap the autohelm button towards the top right of the screen in SeaNav to show the remote control buttons and Autopilot status) :-
The SeaNav Apple Watch can also control the Raymarine AutoPilot. Tap the autopilot symbol (blue bottom centre) on the Waypoint watchface to view the AutoPilot status and controls:-
Setting up SeaNav to use a Raymarine AutoPilot with the NMEA3WIFI device.
Hardware setup
Raymarine ST1000+ and 2000+
Only 3 wires need to be connected, Yellow SeaTalk, 12V brown (+ve) and blue (-ve).
The Raymarine ST1000+/20000+ Tiller pilot has 5 wires in its connecting cable – brown, blue, yellow, green and white.
Connect the yellow SeaTalk wire/terminal(4) from the Raymarine Autohelm/tiller to the Data terminal (3rd in from the left) on the NMEA3WIFI.
Connect 12V and GND on the NMEA3WIFI to the 12V brown (+ve) and blue (-ve) auto tiller power leads or boat supply (pin 1 +and 2 -).
Raymarine ST4000+
Connect the NMEA3WIFI to 12V and the SeaTalk bus using a SeaTalk cable from the control unit rear as above. The correct part number for the cable with a connector one end and bare wires the other is D229 (also Rul-4001-136-A). You can use a SeaTalk cable and cut a connector off one end. The SeaTalk cable data wire is yellow, the + and – 12V wires are usually red (+ve) and black (-ve/gnd).
NMEA3WIFI configuration
You need to have Version 2.9 or later of the firmware to work correctly with iOS*. You can get the latest firmware from here:-
You can auto-configure the NMEA3WIFI with one tap directly from SeaNav. Make sure your iPhone is connected to the NMEA3WIFI network in your device Wifi Settings. Open SeaNav and go to Settings/Advanced Settings and then tap the bottom line. It will let you know if its successfully updated the NMEA3WIFI settings for you. You are then ready to start using it and can skip to the next section “iPhone and SeaNav configuration”
Screenshot
Alternatively you can configure the NMEA3WIF manually. Connect to the NMEA3WIFI by connecting to the NMEA3WIFI network and browsing to 192.168.4.1 in Safari or Chrome. On the Home page change the SSID to NMEA3WIFI:NG so that it will work correctly with iOS*.
You can also set the NMEA3WIFI to access via your local Wifi network (External network ) but this is not a necessity.
We need to set the gateway to receive commands via TCP from SeaNav and send them out over Seatalk and receive SeaTalk messages from the AutoPilot and send them out back to SeaNav. Set the SEATALK1 PORT SETTINGS as below ( ST->TCP).
You also need to set Additional Settings for the ST out to let SeaNav see the Raymarine Autopilot status information. Change the ADDITIONAL SEATALK1 SETTINGS from 0: Default to 1: ADD SOME $STALK and then tap SAVE and RETURN. See screenshot below.
Set the WIFI PORTS SETTINGS on the HOME page to 2001 for TCP and set TCP->ST so SeaNav can send proprietary SeaTalk data to the Autopilot.
*The :NG suffix allows the iPhone/iPad to use cellular data for the internet at the same time as it is connected to the NMEA3WIFI network.
iPhone and SeaNav configuration
Set the iPhone to use the NMEA3WIFI:NG wifi network and connect to it. Check it is connected by browsing to 192.168.4.1 in Safari to see the NMEA3WIFI Home page.
Now configure SeaNav to talk and listen to the AutoPilot. Go to Settings/AIS, GPS & NMEA Link .
Configure it to use TCP to IP address 192.168.4.1 , port 2001 (theTCP port number we just set on the NMEA3WIFI). Set the AutoPilot switch on. If the hardware is all connected up you can tap Start and should see live data from the AutoPilot (via the NMEA3WIFI). Blue for received messages and green for sent.
You are now ready to sail a SeaNav route automatically. Just start sailing a route or to a point by tapping the Sailboat icon. If you want to disconnect SeaNav from the Autopilot tiller/helm tap the Standby button on the autopilot. Re-connect to the SeaNav route by tapping the Auto button. To completely disconnect, turn off the Autopilot switch in SeaNav Settings/AIS, GPS & NMEA Link or stop the link.
Setting up SeaNav to use a Navico (B&G,Simrad,Lowrance) auto tiller/helm or any other NMEA compliant autopilot.
Use an N2K0183 gateway to connect SeaNav to the Autopilot via Wifi and NMEA2000 or NMEA0183.
Hardware set up.
NMEA2000
Connect the N2K0183 to your NMEA2000 bus.
NMEA0183
Use the output from P2 (A2/B2) on the N2K0183 board to connect to the RX +/- inputs on the Autopilot. Connect the autopilot TX +/- (if available) to the P1 A1/B1 port connections.
N.B. A is equivalent to + and B to -.
N2K0183 configuration
You need to have Version 28 or later of the firmware* to work correctly with iOS. You can get the latest firmware from here:-
Connect to the N2K0183 by connecting to the N2K0183 network and browsing to 192.168.4.1 in Safari or Chrome. On the Home page change the SSID to N2K0183:NG so that it will work correctly with iOS and reconnect to it.
You can also set the N2K0183 to access via your local Wifi network (External network ) but this is not a necessity.
The configuration below works with NMEA2000 and NMEA0183. For NMEA0183 ensure the Serial port setting baud rates for P1 and P2 match the baud rate on your Autopilot. In the example below they are both set to 4800.
iPhone and SeaNav configuration
The same as for Raymarine above except to connect to the N2K0183:NG Wifi network.
N.B. There is no remote button control capability for Navico autopilots like there is with Raymarine.
Unlike other Marine Navigation apps on the AppStore, SeaNav comes with a really useful and free Apple Watch App which shows live navigation information, waypoints, compass, wind display and AIS radar. Waypoint reached and CPA (AIS collision) alerts also show up on your Apple Watch.
You can add a launch complication for SeaNav to your main Watchface, so you can tap and go straight to SeaNav.
You can also launch SeaNav by tapping its icon in the Apps view on the watch
Stop and start sailing a route by tapping the boat icon with the cross on it.
SeaNav is now Sailing the currently selected route with the boat symbol showing the heading. SeaNav on your iPhone will also now be in Sailing mode recording your track etc.
Navigation display
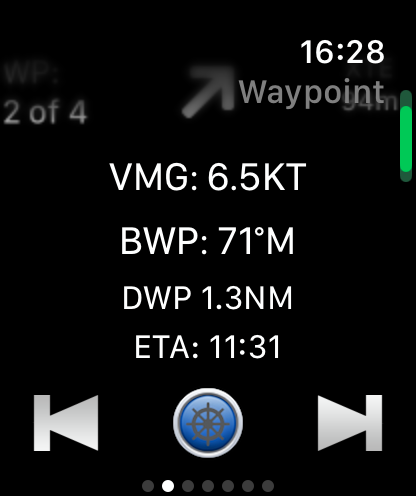
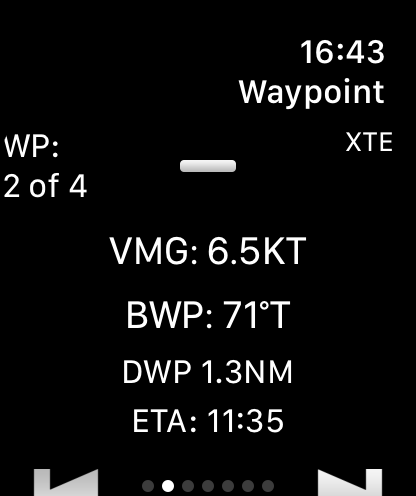
Swipe left to view the WayPoint display. This shows the current Waypoint number, Cross Track error (XTE) and direction to turn to get back on track , vector made good (VMG), bearing to waypoint (BWP) and distance to Waypoint (DWP). You can jump to the previous or next waypoint using the arrows at the bottom of the screen.
Waypoint display
Swipe left again to view the compass showing heading (or course over ground (cog)) with a blue line showing the route direction.
Compass display
Next up is the wind display. This shows a compass with boat heading up, true and apparent wind direction plus the port (red) and starboard (green) laylines ( for sailing). The bearing to the next waypoint is also shown in light blue. The wind display can either use NMEA wind data from a wind instrument on board via Wifi or the current local wind data from the SeaNav live internet weather service (IAP).
Wind display
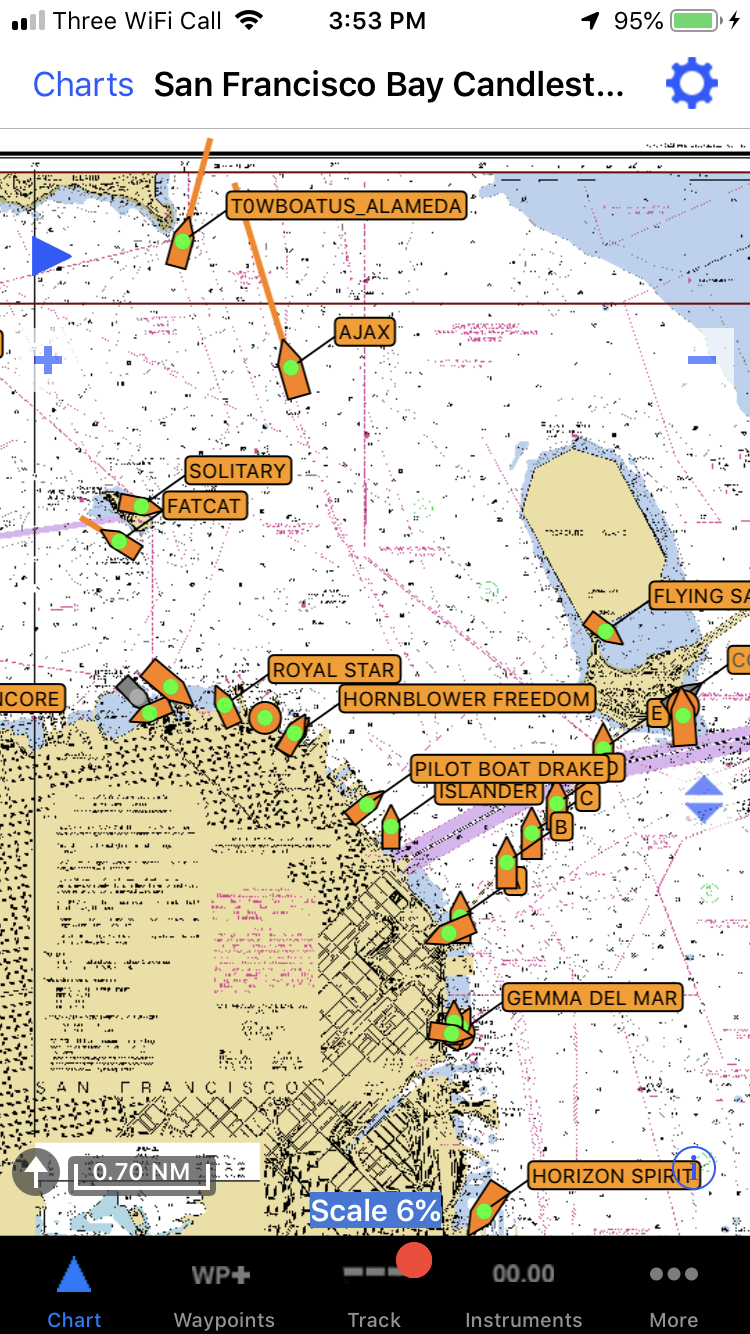
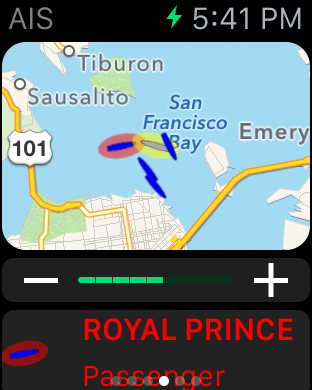
Finally you can check the boats around you with the AIS Map display. CPA boats are shown with a red circle on the map and in red in the scrollable list below. Tap on an item in the list to get more info and a photo.
AIS Map display.
You can try all these features for free in simulation mode with the SeaNav app which is free to download from the AppStore.
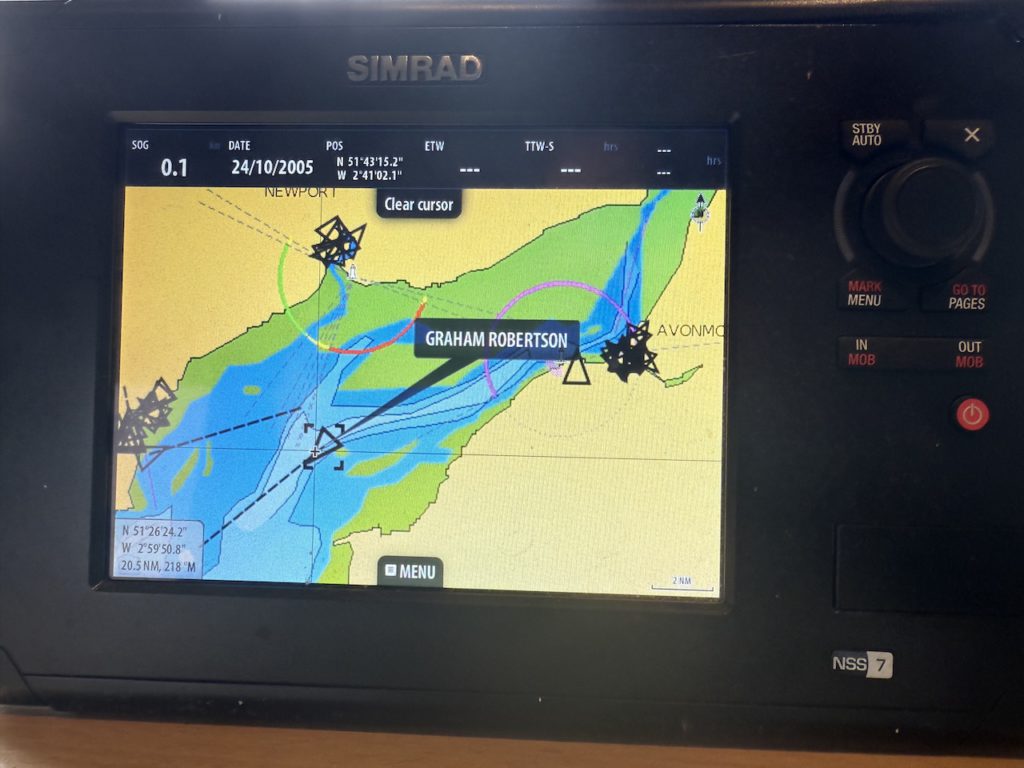
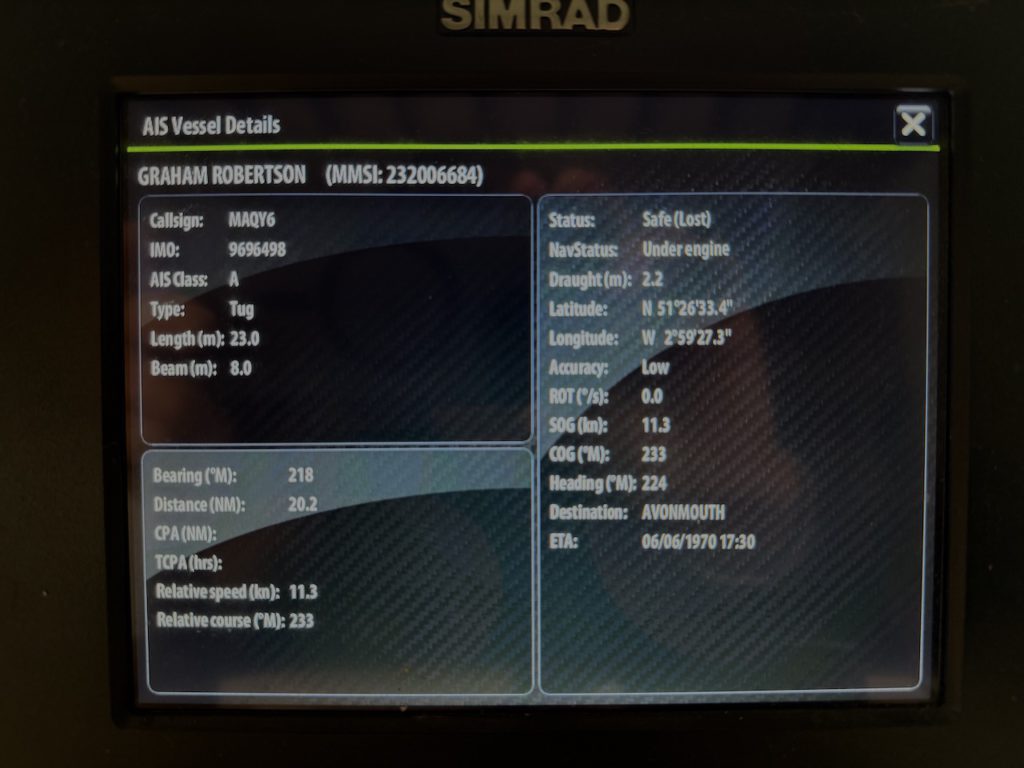
View realtime AIS on your boat’s Multifunction Display (MFD) without an AIS receiver and aerial or improve and extend your local VHF AIS reception with over the horizon and “instant on”* internet AIS. Boat Beacon can share its real time internet AIS data via Wifi and NMEA2000 (or 0183) to MFDs like Garmin, SIMRAD/B&G/Lowrance and Raymarine.
Here is Boat Beacon on an iPhone using Wifi to send its live AIS data to a SIMRAD NSS MFD over NMEA2000 via the N2K0183 adapter.
Here’s how to configure the N2K0183 device with Boat Beacon running on iOS. (Android instructions here). The Boat Beacon AIS data will be received via cellular and sent out over the boat’s NMEA2000 network. You will need the Boat Beacon AIS Share feature enabled (demo mode or IAP). Also make sure you have the latest firmware for the N2K0183 – v2.8 or later. N2K0183V28.BIN (July 2025)
Connect the N2K0183 to the boat’s NMEA2000 network.
Next connect your iPhone to the N2K0183’s Wifi network (SSID N2K0183 password 12345678) and use Safari or Chrome on your iPhone to browse to http://192.168.4.1 to view its setting page.
Set the WIFI ports settings TCP to 2001 and check the TCP to N2K checkbox.
IMPORTANT: If you are using the N2K0183 in “USE N2K0183 AP ONLY” mode, which is the default, you need to change the SSID (top left of the settings page ) to N2K0183:NG.
Using N2K0183:NG as the SSID lets iOS know it cannot use the N2K0183 Wifi connection for internet data. It ensures the iPhone/iPad will still use its cellular connection to connect to the internet and fetch AIS data etc.
Finally tap the blue SET button to set the configuration.
If you have changed the SSID you will need to search and reconnect the iPhone to the new SSID (e.g. N2K0183:NG )Wifi network.
N.B. If you don’t have NMEA2000 on board and want to use and output NMEA0183 check the TCP to P2 checkbox on the N2K0183 and set the Serial Ports Settings for P2> to 38400.
Now launch Boat Beacon and go to Settings. Make sure AIS Sharing is On ( requires demo mode or an IAP) . Next tap the AIS & GPS Link row to configure the connection to the N2K0183.
Set the port to 2001, the Host to 192.168.4.1 and the switch to tx
Then tap Start and you should start to see live AIS data being sent.
Make sure Boat Beacon is set to Sailing mode so that it keeps transmitting even when in background (e.g. screen off). Now check your MFD display connected to the NMEA2000 network and see the live ship positions around you.
If you have a WiFi network on board with internet both Boat Beacon and the N2K0183 can connect via that instead so that Boat Beacon can use that connection instead of your iPhone’s cellular data. Configure the N2K0183 to connect to the boat’s Wifi network ( set the SSID and password and set mode to “ALSO CONNECT TO EXTERNAL”. Then tap the blue “SET” button. The N2K0183 will restart and get an IP address on the Boat’s Wifi network. Note this IP address, it is displayed just under the N2K<>N0183 banner (e.g. 192.168.1.173 – you can still connect to the N2KNMEA via 192.168.4.1 if you want or need to).
With your iPhone connected to the same boat’s Wifi network (e.g. STARLINK) set Boat Beacon’s AIS & GPS Link to send to the N2K0183’s boat’s wifi IP address instead of 192.168.4.1 (e.g. 192.168.1.173) and then tap Start.
You can purchase the N2K0183 NMEA2000 Wifi gateway from here. Other NMEA2000 wireless servers like the DigitalYacht NAVLINK2 , Quark-Elec, Actisense etc. will also work with Boat Beacon to share its live AIS data to your MFD.
*”Instant on” refers to the instant static ship data ( name, type, size etc.) that you get with Boat Beacon’s internet AIS feed whereas with VHF AIS it can take up to 6 minutes to receive a vessels static message and view the info.
Here’s how to configure the N2K0183 device with Boat Beacon running on Android. The Boat Beacon AIS data will be sent out over the boat’s NMEA2000 network.
Connect the N2K0183 to the boat’s NMEA2000 network.
Next connect your Android device to the N2K0183’s Wifi network (SSID N2K0183 password 12345678) and use Chrome to browse to http://192.168.4.1 to view its setting page.
Set the WIFI ports settings TCP to 2001 and check the TCP to N2K checkbox.
If you don’t have NMEA2000 on board and want to use and output NMEA0183 instead check the TCP to P2 checkbox and set the Serial Ports Settings for P2> to 38400.
Finally tap the blue SET button to set the configuration.
Now launch Boat Beacon and go to Settings. Make sure AIS Share is enabled ( requires IAP with 3 day free trial) .
Next tap the Local AIS row to configure the connection to the N2K0183.
Select TCP AIS TX
The Local AIS Host and Port fields will now show and need to be set.
Set the port to 2001 and the Host to 192.168.4.1
Now go back to Boat Beacon’s map view and make sure Boat Beacon is set to Sailing mode (sailboat icon bottom left selected) so that it keeps transmitting even when in background (e.g. screen off or viewing another app). Now check your MFD display connected to the NMEA2000 network and see the live ship positions around you.
If you have a WiFi network on board with internet both Boat Beacon and the N2K0183 can connect via that instead so that Boat Beacon can use that connection instead of your phones cellular data. Configure the N2K0183 to connect to the boat’s Wifi network ( set the SSID and password and set mode to “ALSO CONNECT TO EXTERNAL”. Then tap the blue “SET” button. The N2K0183 will restart and get an IP address on the Boat’s Wifi network. Note this IP address, it is displayed just under the N2K<>N0183 banner (e.g. 192.168.1.173 – you can still connect to the N2KNMEA via 192.168.4.1 if you want or need to).
With your Android device connected to the same boat’s Wifi network (e.g. STARLINK) set Boat Beacon’s Local AIS to send to the N2K0183’s boat’s new wifi IP address e.g. 192.168.1.173 instead of 192.168.4.1.
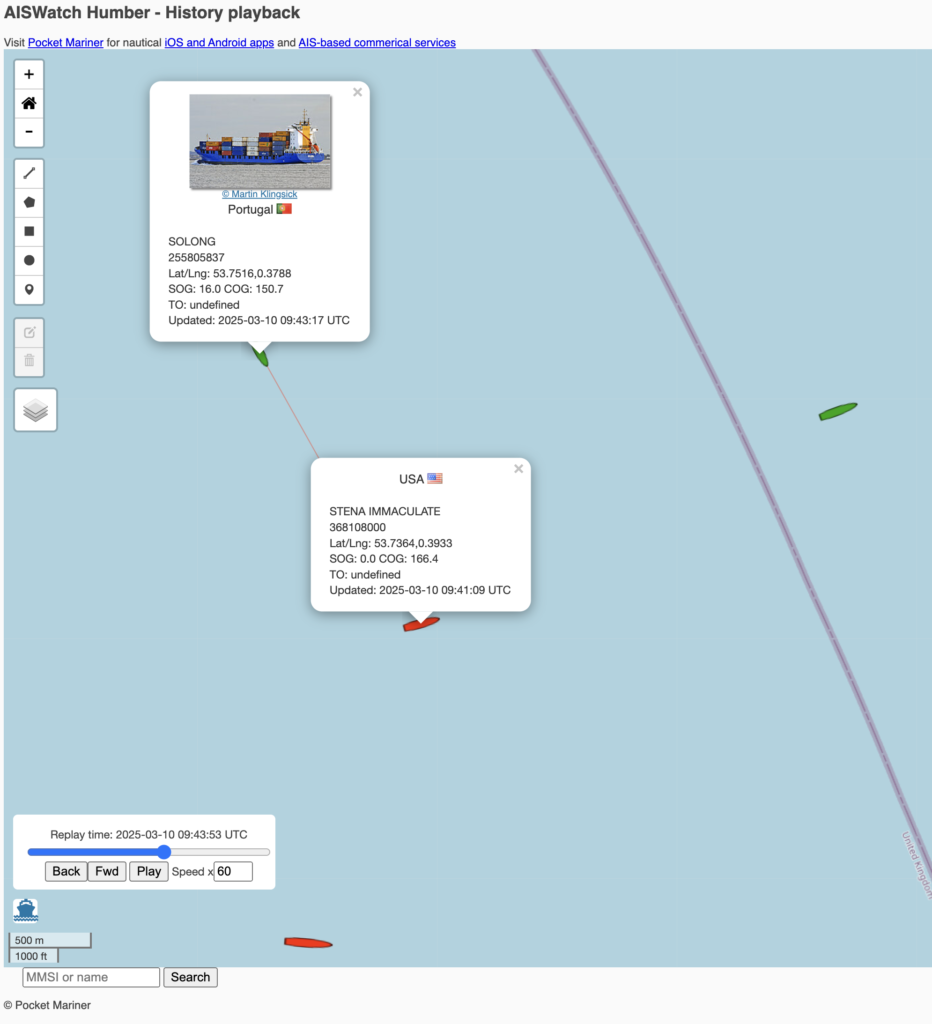
We monitor the Humber Windfarms with our AISWatch service and captured the collision today between Solong ( cargo ship in green) and the Stena Immaculate ( oil tanker in red).
You can watch the AISWatch replay of the incident in 3D here:-
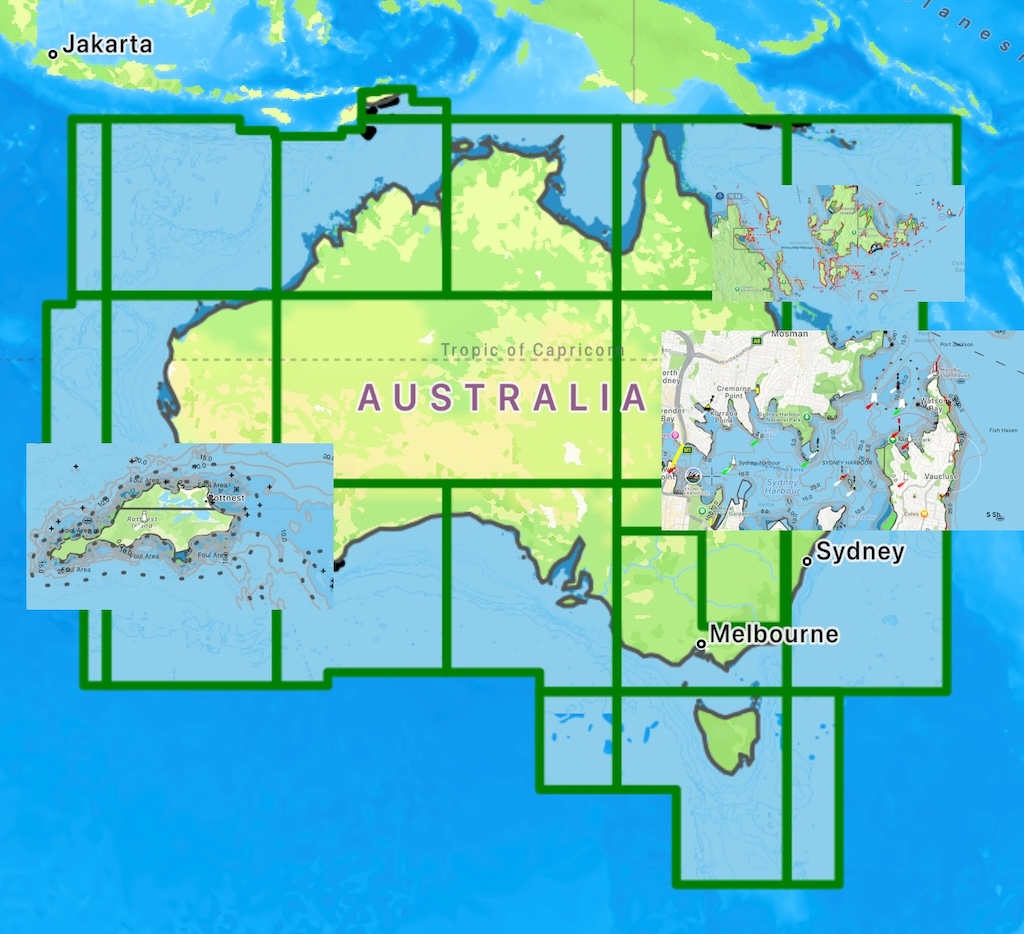
Australian and French vector (ENC) charts are now available for SeaNav.
The French charts include live tidal stream information up to 7 days ahead, especially important for the northern coast and channel. Here is an example for the Golfe du Morbihan in Britanny where PocketMariner’s Captain has personally experienced the very fast tidal flows :-
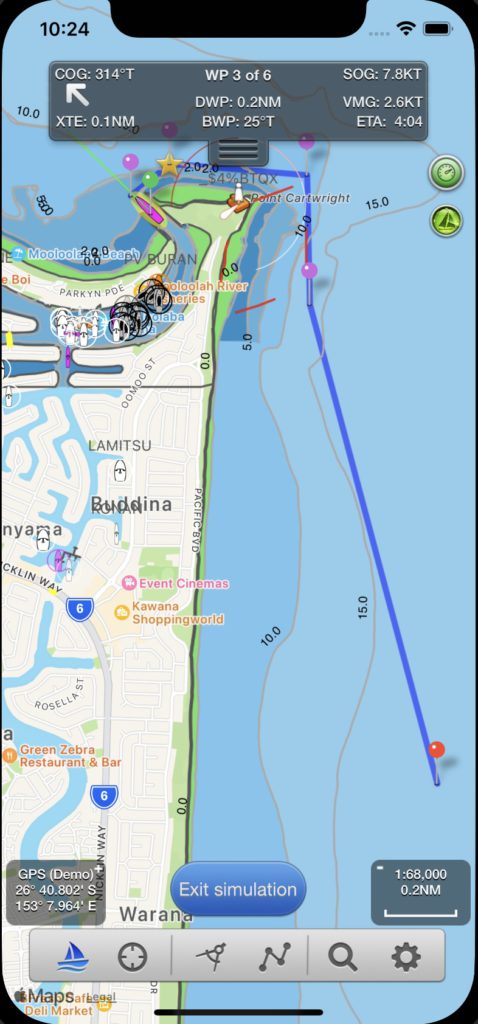
The free version of SeaNav has demo routes which let you try all the advanced features such as AIS (collision detection), Weather, Wind and Depth displays, Tidal Streams, Augmented Reality and of course the charts for free. New demo routes have been added for France and Australia. The demo route for Australia is from Mooloolaba on the Sunshine Coast:-
You can get SeaNav for iPhone, iPad and Apple Silicon Macs free from the AppStore here now:-
There is a great short video by “East Coast Sailing” which recommends our Boat Beacon & SeaNav apps, and includes a very novel and useful way of using a SeaNav route to plan and explore the weather (wind and waves) on the route using full screen Windy on a laptop. Well worth the watch.
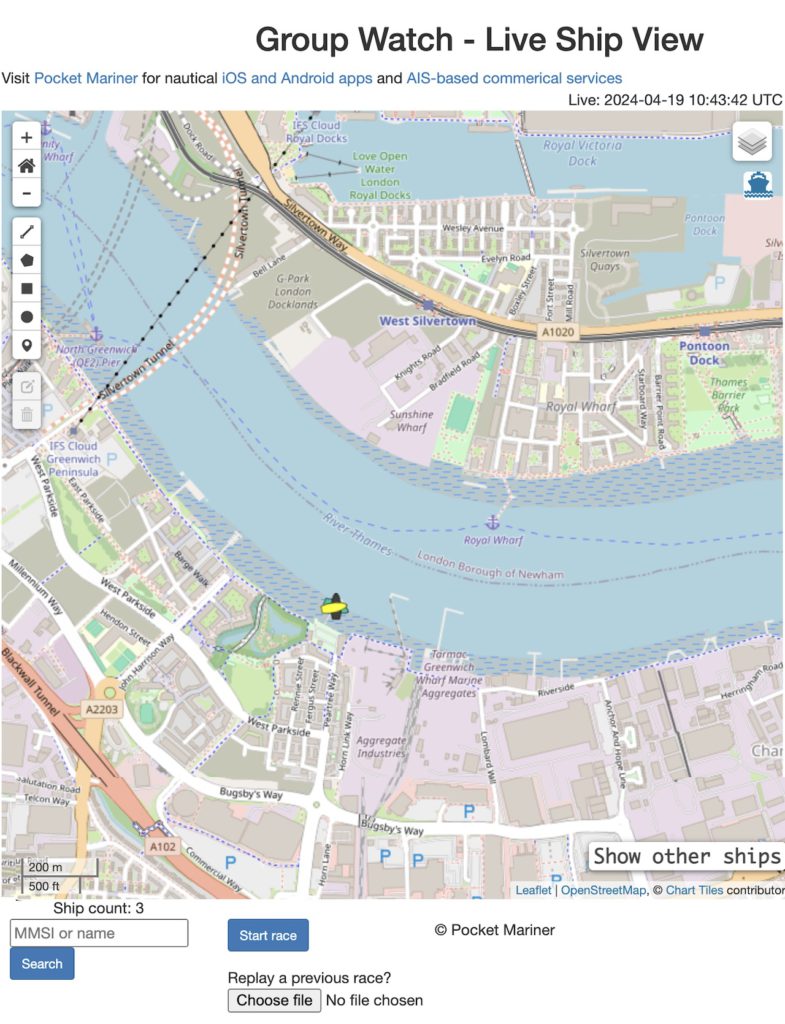
You can now track, record and replay races with Boat Beacon on Android and iOS using groups and the following web page:-
https://boatbeaconapp.com/ais/race/MYGROUPNAME
Where MYGROUPNAME is your group name. The group hashtag name is anything you like up to 20 capital letters (no spaces). Set your group name in Boat Beacon/Settings/My Trip Details.
The initial view shows the last know position of all boats in the group. Click on “Start race” to show and track live positions. A race timer displays how long the race has been running for. Click on “Stop race” to end and save the race information to a local file.
When you stop the race two timestamped files are exported to your local desktop, a .kml file that can be used to view the tracks in Google Earth and a .geojson file which can be re-loaded up to the web page to replay the race using the “Choose file” button.
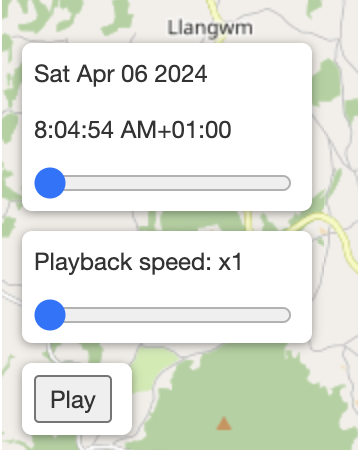
When a previously recorded race is loaded the following controls appear
A slider to fast forward and back through the race and tracks. A Playback speed slider to set the speed of the playback and a Play/Stop button. Click the Play button to start replaying the race from the slider position. There is also a checkbox top right “GPS Tracks” to turn the tracks on and off.
Here is the PocketMariner YC page – currently both boats ashore.
We are looking for early adopters to gather feedback on what other features or improvement could be made to make the new Group Race feature useful. Please let us know if you try it and how you get on by emailing help@pocketmariner.com with the subject “Group races”.
We are also looking at the possibility of tracking yachts and dinghies during club races using inexpensive small GPS trackers like the one below as an alternative to having the Boat Beacon app and are looking for a volunteer Yacht club to try this with.
The basic idea is for the tracker and sim card to be cheap enough for a club to have enough of these devices to hand out to all race participants who don’t have Boat Beacon so they can follow the tracks of all participating yachts and dinghies on screen at the club house and review the race afterwards.
Our tests of the trackers show they can run for around 12 hours on one charge with position updates every 5s (12m accuracy at 5 Knots). We have sourced non-expiring IoT data sim cards which work on all networks with enough data pre-installed for 5 million fixes. We are now looking to try with real races and need a volunteer Yacht club based in the UK. We will supply the trackers for the trial at cost and the service for free. The raw cost per GPS tracker device including the lifetime sim card is around £75. If you are interested please contact help@pocketmariner.com with the subject “Race Trackers”.